
-

Rubidium GPSDO
-
Sim Petri Dish
-

Liquid Level Sensor
-
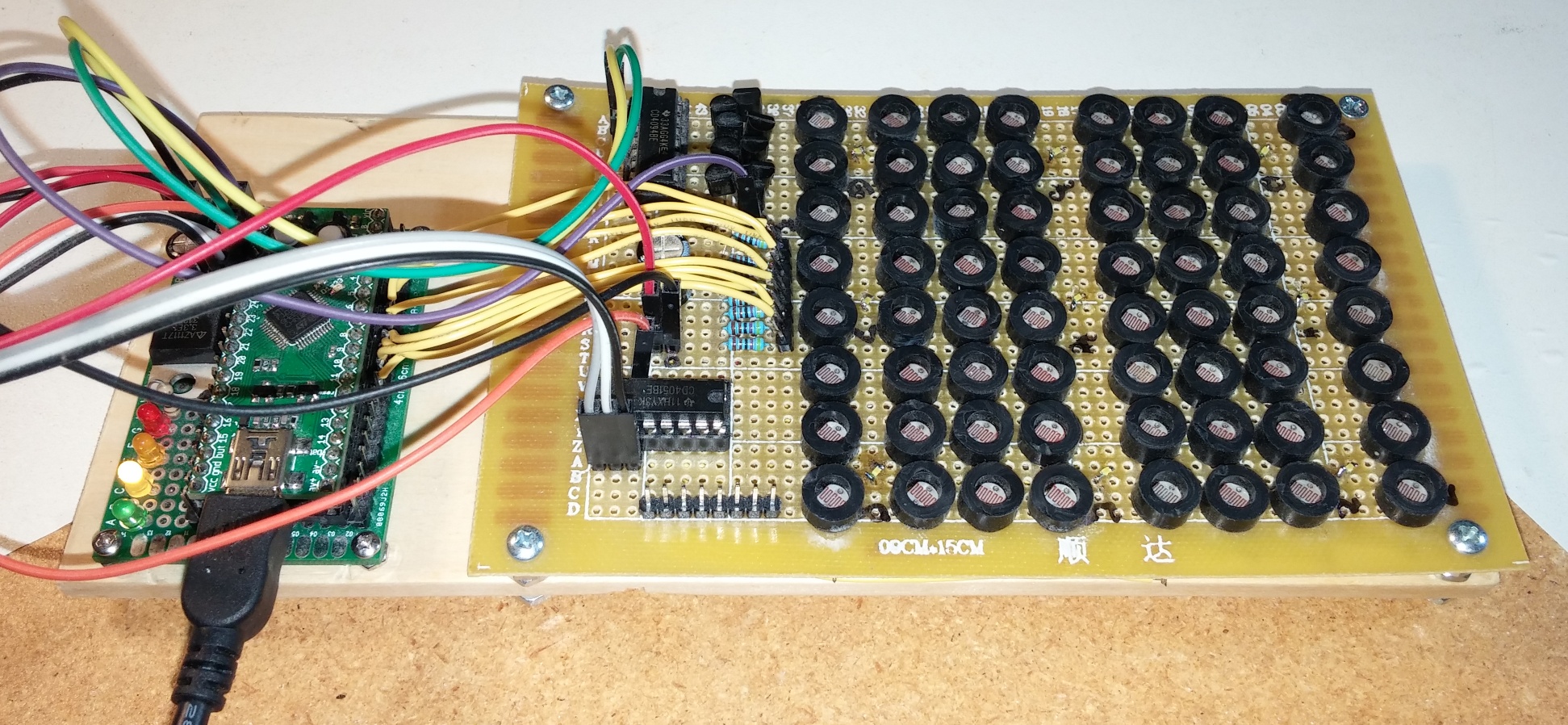
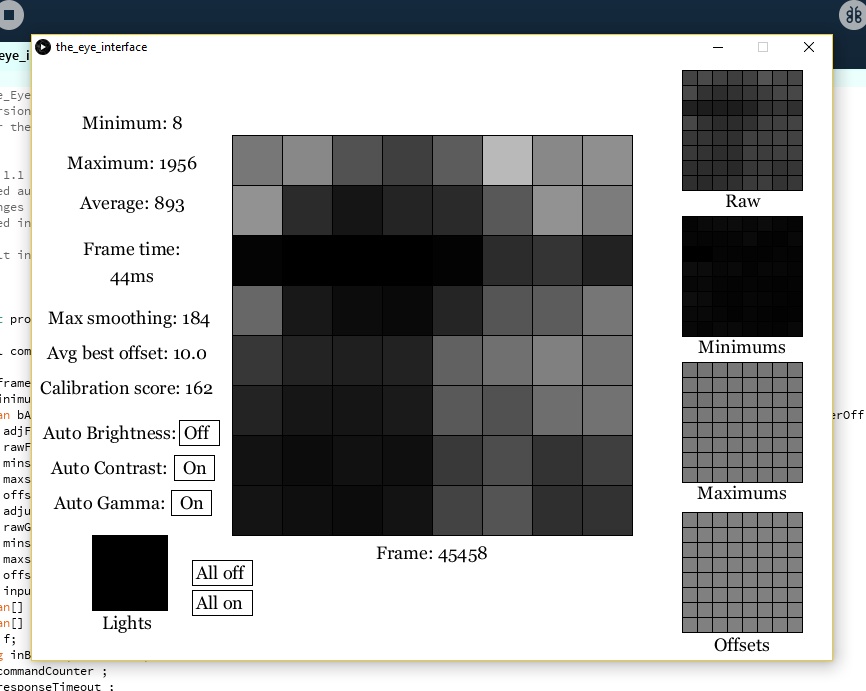
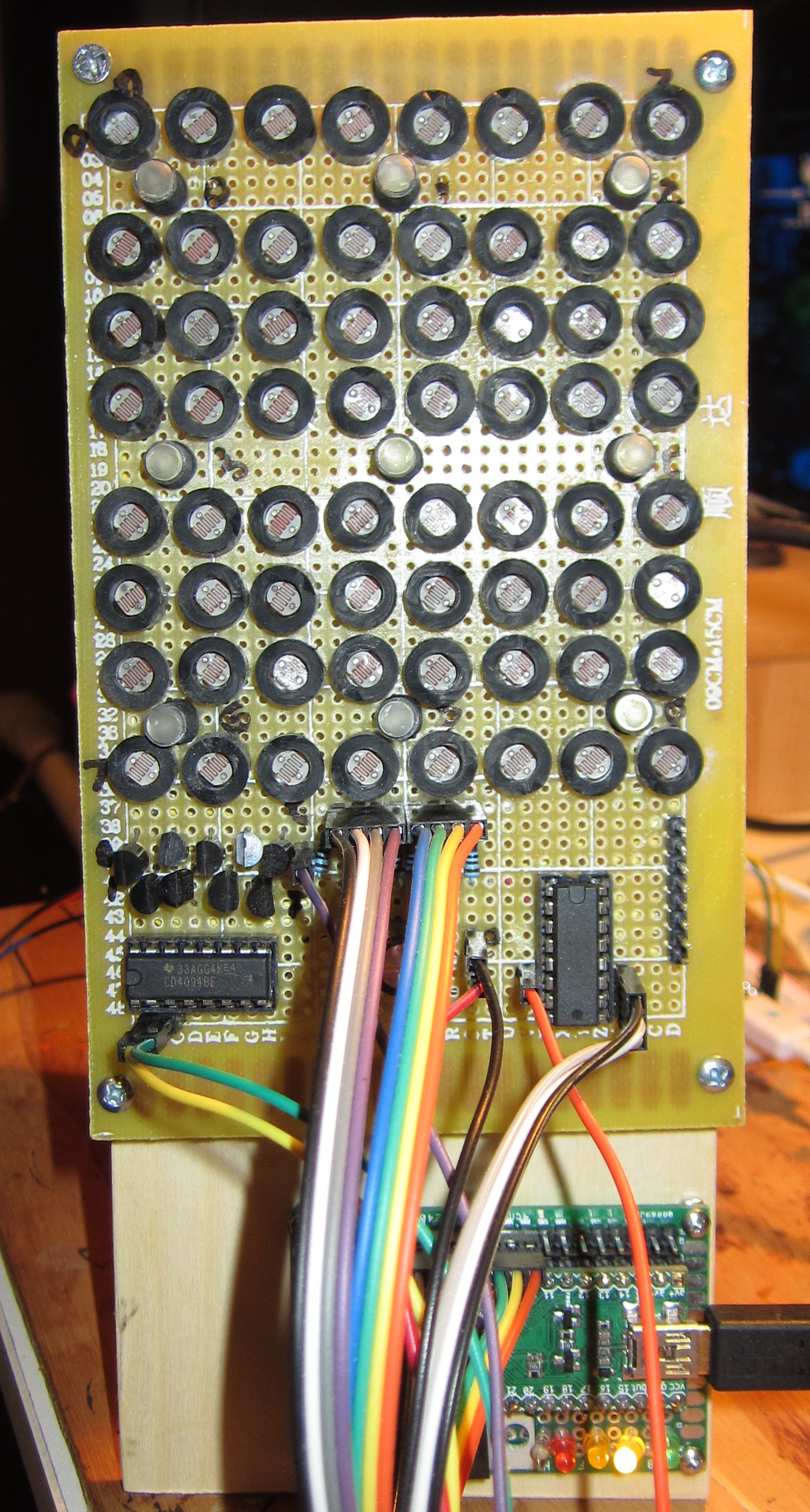
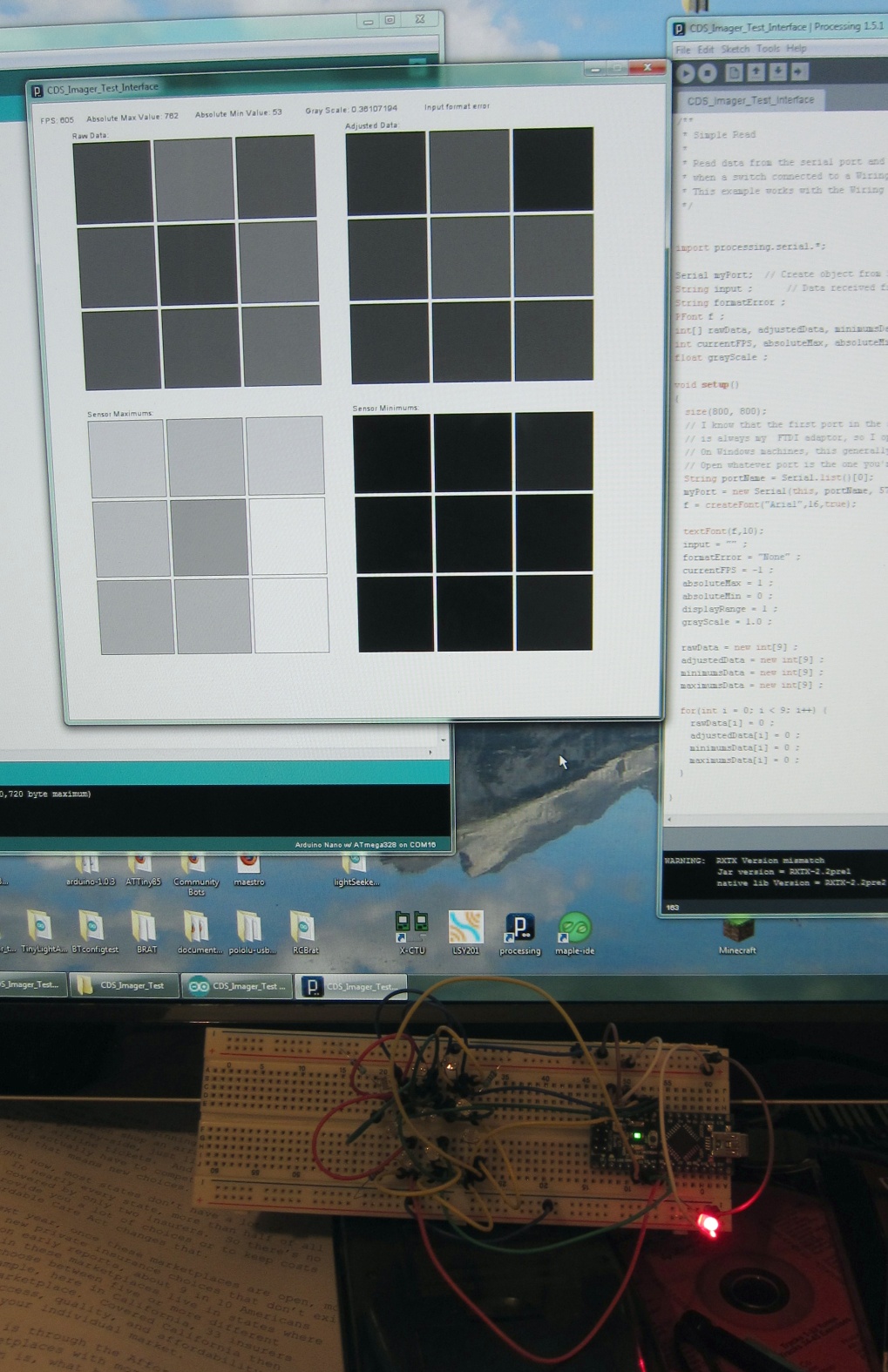
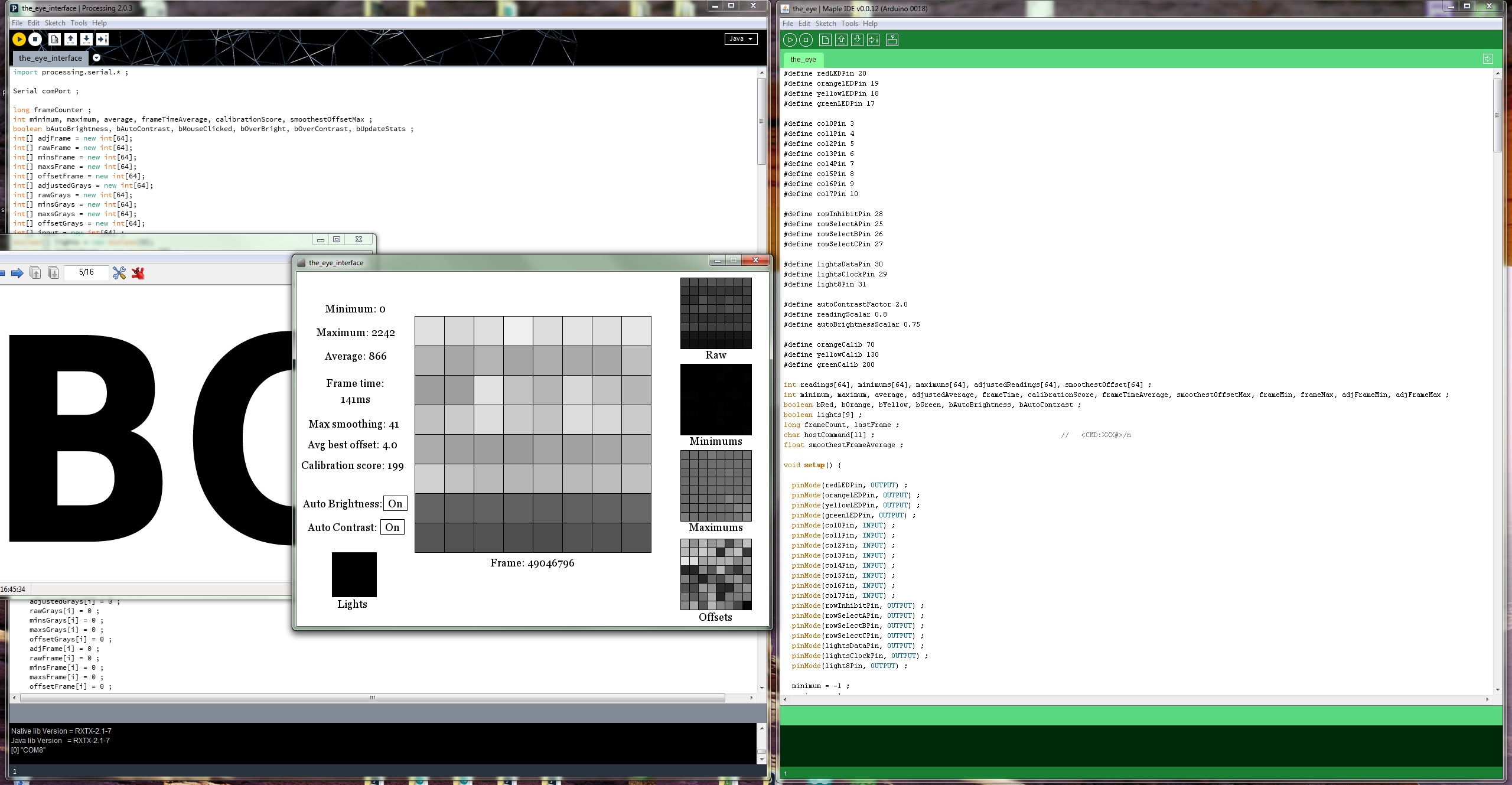
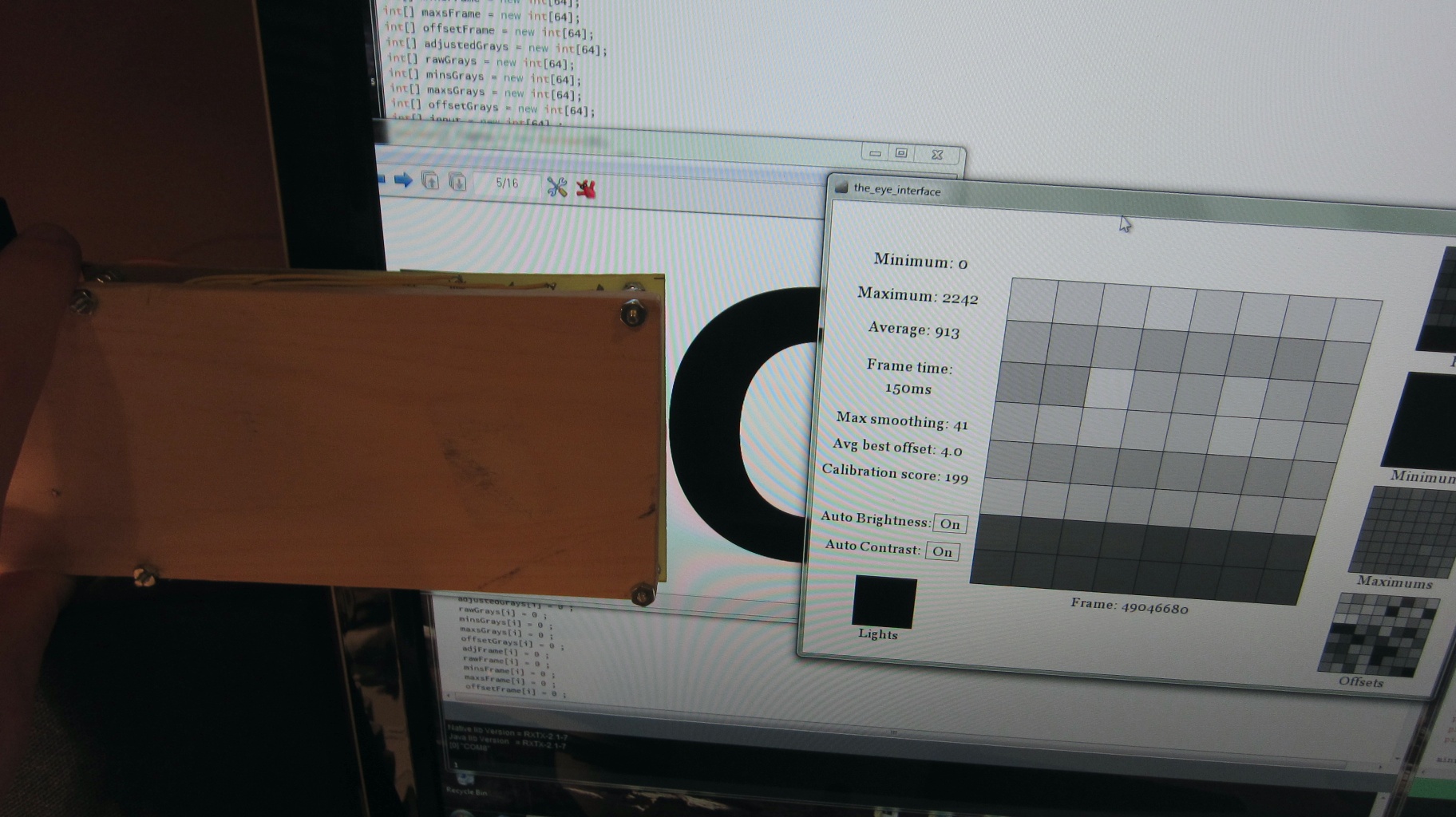
The Eye Robot
